
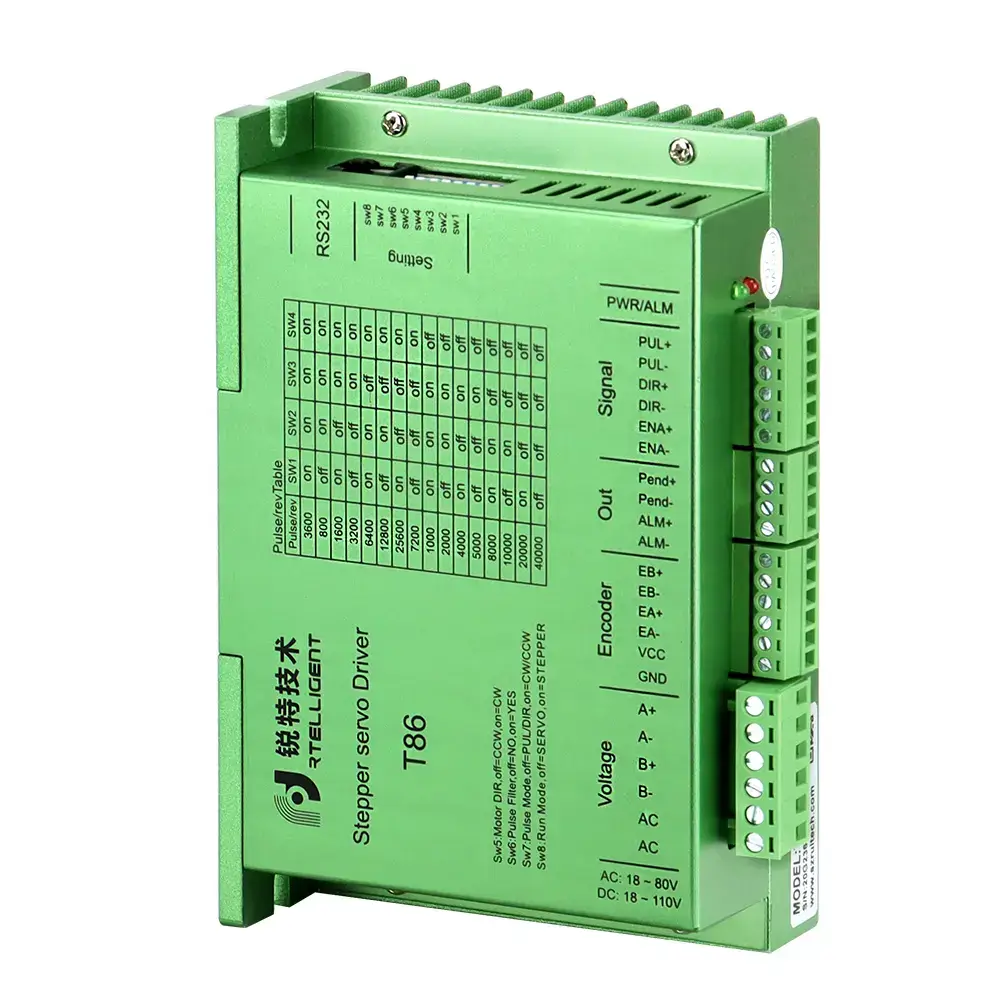
Pulse Control 2 Phase Closed Loop Stepper Drive T86
T86 closed loop stepper drive, based on 32-bit DSP platform, built-in vector control technology and servo demodulation function, combined with the feedback of closed-loop motor encoder, makes the closed loop stepper system has the characteristics of low noise, low heat, no loss of step and higher application speed, which can improve the performance of intelligent equipment system in all aspects.
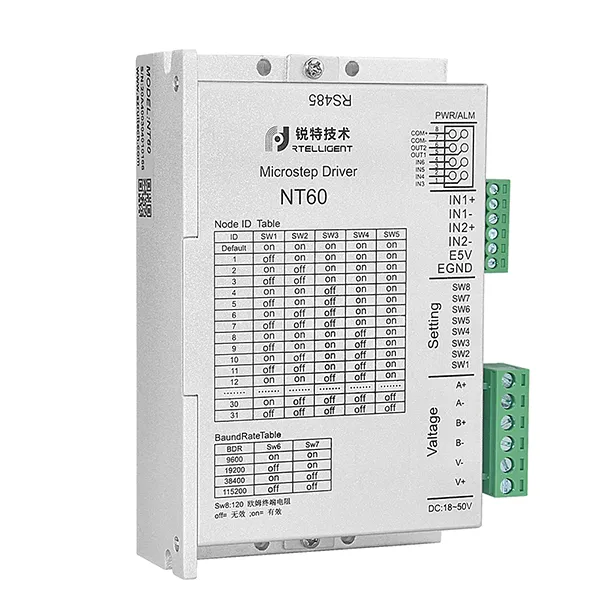
Fieldbus Stepper Drive Series - NT60
485 fieldbus stepper drive NT60 is based on RS-485 network to run Modbus R TU protocol. The intelligent motion control function is integrated, and with external IO control, it can complete functions such as fixed position/ fixed speed/multi- position/auto-homing.
NT60 matches open loop or closed loop stepper motors below 60mm.

2 Phase Closed-Loop Stepper Motor
New 2-phase closed loop stepper motors AM seriesare based on Cz optimized magnetic circuit design and the latest compact M-shaped molds. The motor body uses high magnetic density stator and rotor materials with high energy efficiency.